Next: Simulation Results
Up: Example Problem: Identification of
Previous: Example Problem: Identification of
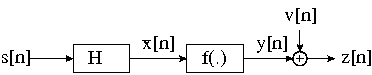
The nonlinear Wiener system is a well-known and simple nonlinear
system which consists of a series connection of a linear filter
and a memoryless non-linearity (see Fig.
1). Such a nonlinear channel can be
encountered in digital satellite communications [9] and in
digital magnetic recording [10]. Traditionally, the
problem of blind nonlinear equalization or identification has been
tackled by considering nonlinear structures such as MLPs
[11], recurrent neural networks [12], or
piecewise linear networks [13].
Here we consider a supervised identification problem, in which
moreover at a given time instant the linear channel coefficients
are changed abruptly to compare the tracking capabilities of both
algorithms: During the first part of the simulation, the linear
channel is
 and after receiving
and after receiving  symbols it is changed into
symbols it is changed into
 . A binary signal is
sent through this channel and then the nonlinear function
. A binary signal is
sent through this channel and then the nonlinear function
 is applied on it, where
is applied on it, where  is the linear channel
output. Finally, white Gaussian noise is added to match an SNR of
is the linear channel
output. Finally, white Gaussian noise is added to match an SNR of
 dB. The Wiener system is then treated as a black box of which
only input and output are known.
dB. The Wiener system is then treated as a black box of which
only input and output are known.
Figure 1:
A nonlinear Wiener system.
|
|
Next: Simulation Results
Up: Example Problem: Identification of
Previous: Example Problem: Identification of
 Pdf version (187 KB)
Pdf version (187 KB)
Steven Van Vaerenbergh
Last modified: 2006-03-08